Line Chart · 折线图#small-multiples#training-curve#per-panel-y-scale#times-new-roman
PreRL · 1×4 line panels of cognitive-behavior counts vs step
PreRL · 1×4 折线面板:认知行为计数 vs 训练步数
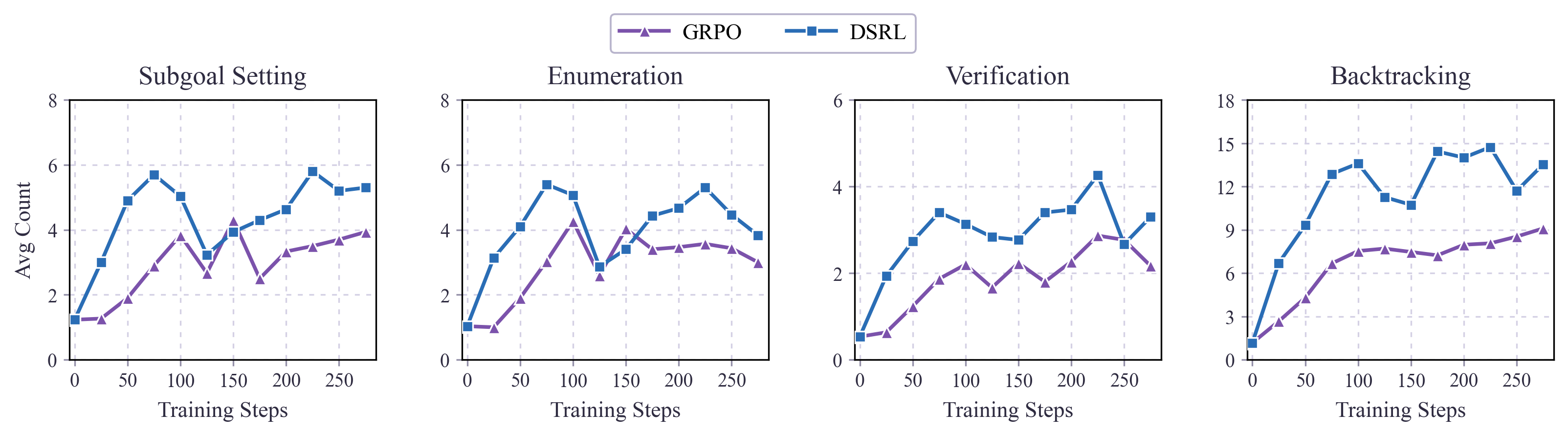
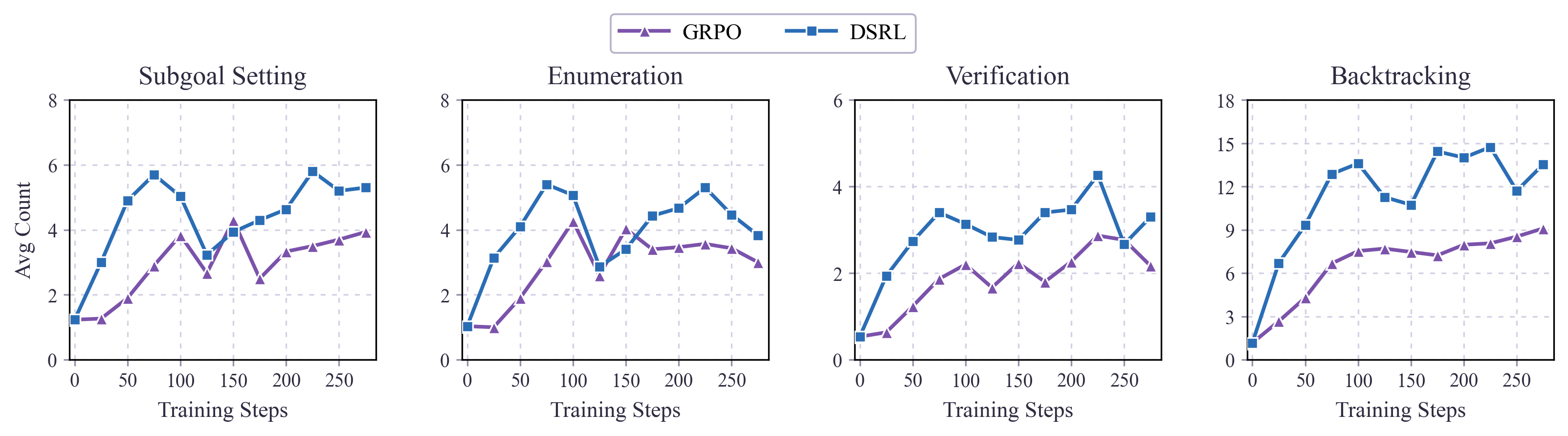
1×4 horizontal line panels comparing two RL methods (DSRL vs GRPO) across four chain-of-thought behaviors: Subgoal Setting, Enumeration, Verification, Backtracking. Per-panel y-scale (0–8 / 0–8 / 0–6 / 0–18). Square markers (DSRL, navy), triangle markers (GRPO, purple), white marker edge, dotted purple-grey grid, Times New Roman serif. Top-centre frameless legend.
1×4 横向折线面板,DSRL(深蓝方块)vs GRPO(紫色三角)在四种思维行为上的训练曲线:Subgoal / Enumeration / Verification / Backtracking。每个面板独立 y 轴 (0–8 / 0–8 / 0–6 / 0–18)。标记白边、点状紫灰网格、Times New Roman serif,顶部居中无边框图例。
@paper · 来自论文
PreRL: Pre-train-Anchored Reinforcement Learning for Language Models
PreRL:预训练锚定的语言模型强化学习
PreRL Authors · arXiv 2026
// original from paper · 论文原图
// reproduced via prerl_behavior_panels.py · 脚本复现download png
prerl_behavior_panels.py
"""1x4 horizontal line panels: cognitive-behavior counts vs training step.
Reproduces the `avg_count_panels` figure from the PreRL paper
(arXiv:2602.02488). Compares two RL methods (DSRL vs GRPO) across four
chain-of-thought behaviors (Subgoal Setting / Enumeration / Verification /
Backtracking) along the training trajectory.
Standalone: just `python prerl_behavior_panels.py`. All data is inline.
"""
import matplotlib.pyplot as plt
from matplotlib.lines import Line2D
# ──────────────────────────────────────────────────────────────────────
# Data (per-checkpoint average counts of each behavior).
# ──────────────────────────────────────────────────────────────────────
dsrl_step0 = {"step": 0, "backtracking": 1.167, "verification": 0.533,
"subgoal": 1.233, "enumeration": 1.033}
dsrl = [
dsrl_step0,
{"step": 25, "backtracking": 6.7, "verification": 1.933, "subgoal": 3.0, "enumeration": 3.133},
{"step": 50, "backtracking": 9.333, "verification": 2.733, "subgoal": 4.9, "enumeration": 4.1},
{"step": 75, "backtracking": 12.867, "verification": 3.4, "subgoal": 5.7, "enumeration": 5.4},
{"step": 100, "backtracking": 13.6, "verification": 3.133, "subgoal": 5.033, "enumeration": 5.067},
{"step": 125, "backtracking": 11.267, "verification": 2.833, "subgoal": 3.233, "enumeration": 2.867},
{"step": 150, "backtracking": 10.733, "verification": 2.767, "subgoal": 3.933, "enumeration": 3.4},
{"step": 175, "backtracking": 14.433, "verification": 3.4, "subgoal": 4.3, "enumeration": 4.433},
{"step": 200, "backtracking": 14.0, "verification": 3.467, "subgoal": 4.633, "enumeration": 4.667},
{"step": 225, "backtracking": 14.733, "verification": 4.267, "subgoal": 5.8, "enumeration": 5.3},
{"step": 250, "backtracking": 11.7, "verification": 2.667, "subgoal": 5.2, "enumeration": 4.467},
{"step": 275, "backtracking": 13.533, "verification": 3.3, "subgoal": 5.3, "enumeration": 3.833},
]
grpo = [
{"step": 0, "backtracking": 1.167, "verification": 0.533, "subgoal": 1.233, "enumeration": 1.033},
{"step": 25, "backtracking": 2.667, "verification": 0.633, "subgoal": 1.267, "enumeration": 1.0},
{"step": 50, "backtracking": 4.3, "verification": 1.233, "subgoal": 1.9, "enumeration": 1.9},
{"step": 75, "backtracking": 6.667, "verification": 1.867, "subgoal": 2.9, "enumeration": 3.033},
{"step": 100, "backtracking": 7.533, "verification": 2.2, "subgoal": 3.833, "enumeration": 4.267},
{"step": 125, "backtracking": 7.7, "verification": 1.667, "subgoal": 2.667, "enumeration": 2.6},
{"step": 150, "backtracking": 7.467, "verification": 2.233, "subgoal": 4.3, "enumeration": 4.033},
{"step": 175, "backtracking": 7.233, "verification": 1.8, "subgoal": 2.5, "enumeration": 3.4},
{"step": 200, "backtracking": 7.967, "verification": 2.267, "subgoal": 3.333, "enumeration": 3.467},
{"step": 225, "backtracking": 8.067, "verification": 2.867, "subgoal": 3.5, "enumeration": 3.567},
{"step": 250, "backtracking": 8.533, "verification": 2.767, "subgoal": 3.7, "enumeration": 3.433},
{"step": 275, "backtracking": 9.1, "verification": 2.167, "subgoal": 3.933, "enumeration": 3.0},
]
categories = [
{"key": "subgoal", "title": "Subgoal Setting", "ymin": 0, "ymax": 8, "yticks": [0, 2, 4, 6, 8]},
{"key": "enumeration", "title": "Enumeration", "ymin": 0, "ymax": 8, "yticks": [0, 2, 4, 6, 8]},
{"key": "verification", "title": "Verification", "ymin": 0, "ymax": 6, "yticks": [0, 2, 4, 6]},
{"key": "backtracking", "title": "Backtracking", "ymin": 0, "ymax": 18, "yticks": [0, 3, 6, 9, 12, 15, 18]},
]
# ──────────────────────────────────────────────────────────────────────
# Style
# ──────────────────────────────────────────────────────────────────────
COL_GRPO = "#7b52ab"
COL_DSRL = "#2a6db5"
GRID_COL = "#d4d0e4"
plt.rcParams.update({
"font.family": "serif",
"font.serif": ["Times New Roman", "Times", "DejaVu Serif"],
"font.weight": "normal",
"axes.titleweight": "normal",
"axes.labelweight": "normal",
"font.size": 11,
"axes.titlesize": 13,
"axes.labelsize": 11,
"xtick.labelsize": 9.5,
"ytick.labelsize": 9.5,
"legend.fontsize": 11,
})
# ──────────────────────────────────────────────────────────────────────
# Figure (1×4 horizontal)
# ──────────────────────────────────────────────────────────────────────
fig, axes = plt.subplots(1, 4, figsize=(11, 3), facecolor="white")
fig.subplots_adjust(left=0.07, right=0.99, top=0.76, bottom=0.17, wspace=0.28)
steps_dsrl = [d["step"] for d in dsrl]
steps_grpo = [d["step"] for d in grpo]
for ax, cat in zip(axes, categories):
key = cat["key"]
y_dsrl = [d[key] for d in dsrl]
y_grpo = [d[key] for d in grpo]
ax.set_axisbelow(True)
ax.yaxis.grid(True, color=GRID_COL, linewidth=0.8, linestyle=(0, (3, 4)))
ax.xaxis.grid(True, color=GRID_COL, linewidth=0.8, linestyle=(0, (3, 4)))
ax.plot(steps_grpo, y_grpo, color=COL_GRPO, linewidth=1.8,
marker="^", markersize=6, markerfacecolor=COL_GRPO,
markeredgecolor="white", markeredgewidth=0.8, zorder=3)
ax.plot(steps_dsrl, y_dsrl, color=COL_DSRL, linewidth=1.8,
marker="s", markersize=5.5, markerfacecolor=COL_DSRL,
markeredgecolor="white", markeredgewidth=0.8, zorder=3)
ax.set_xlim(-5, 285)
ax.set_ylim(cat["ymin"], cat["ymax"])
ax.set_yticks(cat["yticks"])
ax.set_xticks([0, 50, 100, 150, 200, 250])
for spine in ax.spines.values():
spine.set_linewidth(0.8)
ax.tick_params(axis="both", which="both", length=3, color="#9490a8",
labelcolor="#2e2b40", pad=3)
ax.set_title(cat["title"], pad=8, color="#2e2b40")
ax.set_xlabel("Training Steps", labelpad=5, color="#2e2b40")
axes[0].set_ylabel("Avg Count", labelpad=6, color="#2e2b40")
for ax in axes[1:]:
ax.set_ylabel("")
# ──────────────────────────────────────────────────────────────────────
# Legend (top, gray box)
# ──────────────────────────────────────────────────────────────────────
legend_elements = [
Line2D([0], [0], color=COL_GRPO, linewidth=1.8, marker="^", markersize=6,
markerfacecolor=COL_GRPO, markeredgecolor="white", markeredgewidth=0.8,
label="GRPO"),
Line2D([0], [0], color=COL_DSRL, linewidth=1.8, marker="s", markersize=5.5,
markerfacecolor=COL_DSRL, markeredgecolor="white", markeredgewidth=0.8,
label="DSRL"),
]
leg = fig.legend(
handles=legend_elements,
loc="upper center", ncol=2,
bbox_to_anchor=(0.5, 0.98),
frameon=True, framealpha=1.0, edgecolor="#b8b4cc",
fontsize=11, handlelength=2.2, columnspacing=2.0, handletextpad=0.6,
)
leg.get_frame().set_linewidth(0.9)
plt.savefig("avg_count_panels.png", dpi=300,
bbox_inches="tight", facecolor="white")
print("Saved avg_count_panels.png")